:
evo-master.zip
资源介绍:
evo-master.zip
# evo
***Python package for the evaluation of odometry and SLAM***
| Linux / macOS / Windows / ROS / ROS2 |
| :---: |
| [](https://dev.azure.com/michl2222/michl2222/_build/latest?definitionId=1&branchName=master) |
This package provides executables and a small library for handling, evaluating and comparing the trajectory output of odometry and SLAM algorithms.
Supported trajectory formats:
* 'TUM' trajectory files
* 'KITTI' pose files
* 'EuRoC MAV' (.csv groundtruth and TUM trajectory file)
* ROS and ROS2 bagfile with `geometry_msgs/PoseStamped`, `geometry_msgs/TransformStamped`, `geometry_msgs/PoseWithCovarianceStamped`, `geometry_msgs/PointStamped` or `nav_msgs/Odometry` topics or [TF messages](https://github.com/MichaelGrupp/evo/wiki/Formats#bag---ros-bagfile)
See [here](https://github.com/MichaelGrupp/evo/wiki/Formats) for more infos about the formats.
 ---
## Why?
evo has several advantages over other public benchmarking tools:
* common tools for different formats
* algorithmic options for association, alignment, scale adjustment for monocular SLAM etc.
* flexible options for output, [plotting](https://github.com/MichaelGrupp/evo/wiki/Plotting) or export (e.g. LaTeX plots or Excel tables)
* a powerful, configurable CLI that can cover many use cases
* modular `core` and `tools` libraries for custom extensions
* faster than other established Python-based tools ([see here](https://github.com/MichaelGrupp/evo/blob/master/doc/performance.md))
**What it's not:** a 1-to-1 re-implementation of a particular evaluation protocol tailored to a specific dataset.
---
## Installation / Upgrade
Installation is easy-peasy if you're familiar with this: https://xkcd.com/1987/#
evo supports **Python 3.8+**.
You might also want to use a [virtual environment](https://github.com/MichaelGrupp/evo/blob/master/doc/install_in_virtualenv.md).
### From PyPi
If you just want to use the executables of the latest release version, the easiest way is to run:
```bash
pip install evo
```
This will download the package and its dependencies from [PyPI](https://pypi.org/project/evo/) and install or upgrade them. If you want, you can subscribe to new releases via https://libraries.io/pypi/evo.
### From Source
Run this in the repository's base folder:
```bash
pip install --editable .
```
### Tab completion
Tab completion is supported via the [argcomplete](https://github.com/kislyuk/argcomplete/) package. Run `activate-global-python-argcomplete` after the installation to use it.
### Dependencies
**Python packages**
evo has some required dependencies that are ***automatically resolved*** during installation with pip.
See the `pyproject.toml` file for all details.
**PyQt5 (optional)**
PyQt5 will give you the enhanced GUI for plot figures from the "*Qt5Agg*" matplotlib backend (otherwise: "*TkAgg*"). If PyQt5 is already installed when installing this package, it will be used as a default (see `evo_config show`). To change the plot backend afterwards, run `evo_config set plot_backend Qt5Agg`.
**ROS (optional)**
Some ROS-related features require a ROS installation, see [here](http://www.ros.org/). We are testing this package with ROS Noetic and Iron. Previous versions (`<= 1.12.0`) work with Melodic, Kinetic and Indigo.
*Note:* reading ROS bag files works also without a ROS installation thanks to the great [rosbags](https://pypi.org/project/rosbags/) package that is installed together with evo. This allows you also to read ROS 1 & 2 bags even if you don't have one of those ROS distros installed. (except for reading `/tf` topics, because there we need the buffer implementation from ROS)
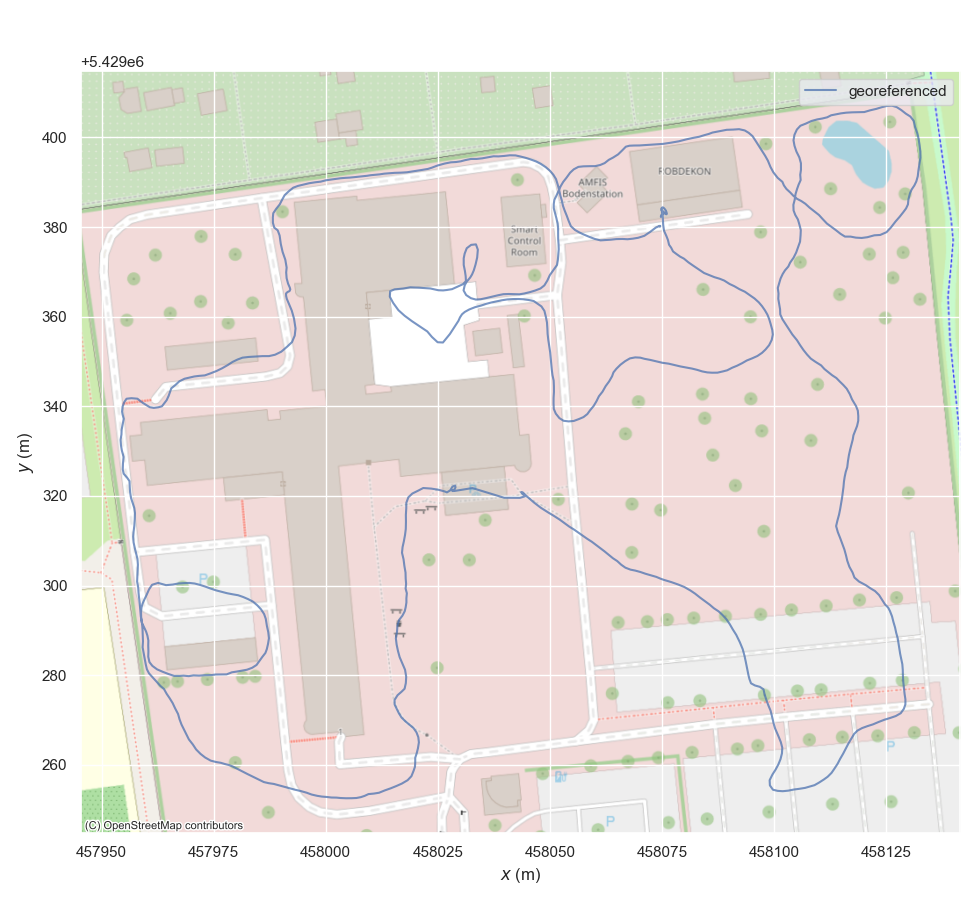
**contextily (optional)**
[contextily](https://contextily.readthedocs.io/en/latest/index.html) is required for [adding map tiles](https://github.com/MichaelGrupp/evo/wiki/Plotting#geographic-map-tiles) to plots of geo-referenced data.
---
## Command Line Interface
After installation with pip, the following executables can be called globally from your command-line:
**Metrics:**
* `evo_ape` - absolute pose error
* `evo_rpe` - relative pose error
**Tools:**
* `evo_traj` - tool for analyzing, plotting or exporting one or more trajectories
* `evo_res` - tool for comparing one or multiple result files from `evo_ape` or `evo_rpe`
* `evo_fig` - (experimental) tool for re-opening serialized plots (saved with `--serialize_plot`)
* `evo_config` - tool for global settings and config file manipulation
Call the commands with `--help` to see the options, e.g. `evo_ape --help`. Tab-completion of command line parameters is available on UNIX-like systems.
**More documentation**
Check out the [Wiki on GitHub](https://github.com/MichaelGrupp/evo/wiki).
---
## Example Workflow
There are some example trajectories in the source folder in `test/data`.
### 1.) Plot multiple trajectories
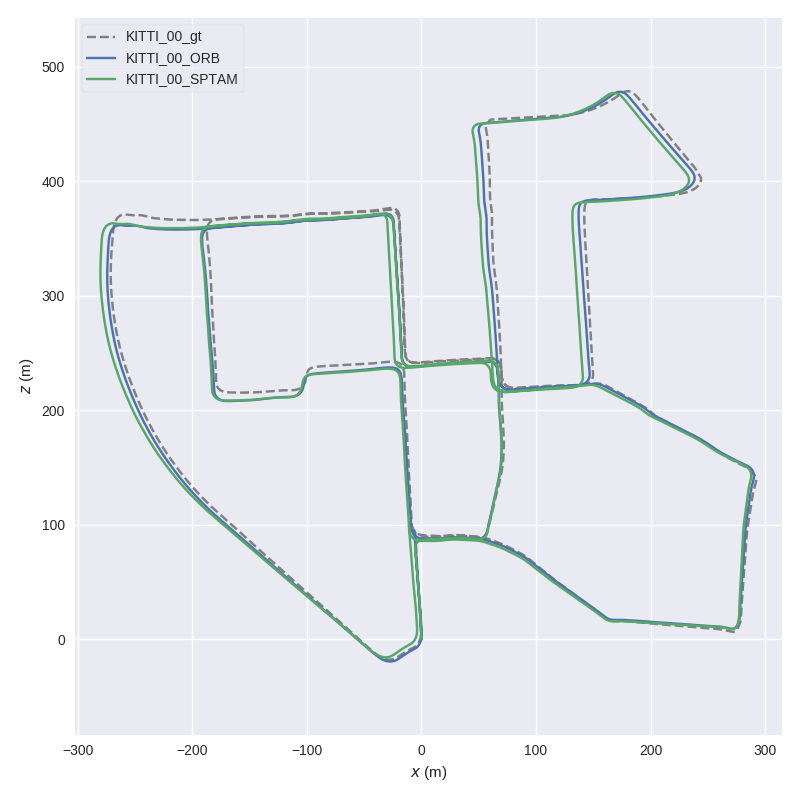
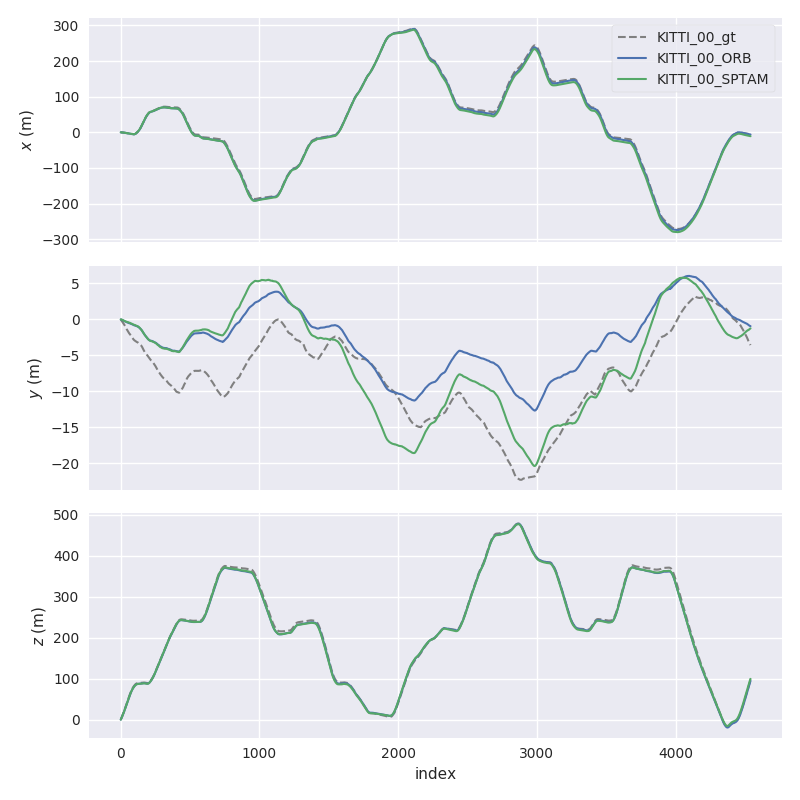
Here, we plot two KITTI pose files and the ground truth using `evo_traj`:
```
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz
```
---
## Why?
evo has several advantages over other public benchmarking tools:
* common tools for different formats
* algorithmic options for association, alignment, scale adjustment for monocular SLAM etc.
* flexible options for output, [plotting](https://github.com/MichaelGrupp/evo/wiki/Plotting) or export (e.g. LaTeX plots or Excel tables)
* a powerful, configurable CLI that can cover many use cases
* modular `core` and `tools` libraries for custom extensions
* faster than other established Python-based tools ([see here](https://github.com/MichaelGrupp/evo/blob/master/doc/performance.md))
**What it's not:** a 1-to-1 re-implementation of a particular evaluation protocol tailored to a specific dataset.
---
## Installation / Upgrade
Installation is easy-peasy if you're familiar with this: https://xkcd.com/1987/#
evo supports **Python 3.8+**.
You might also want to use a [virtual environment](https://github.com/MichaelGrupp/evo/blob/master/doc/install_in_virtualenv.md).
### From PyPi
If you just want to use the executables of the latest release version, the easiest way is to run:
```bash
pip install evo
```
This will download the package and its dependencies from [PyPI](https://pypi.org/project/evo/) and install or upgrade them. If you want, you can subscribe to new releases via https://libraries.io/pypi/evo.
### From Source
Run this in the repository's base folder:
```bash
pip install --editable .
```
### Tab completion
Tab completion is supported via the [argcomplete](https://github.com/kislyuk/argcomplete/) package. Run `activate-global-python-argcomplete` after the installation to use it.
### Dependencies
**Python packages**
evo has some required dependencies that are ***automatically resolved*** during installation with pip.
See the `pyproject.toml` file for all details.
**PyQt5 (optional)**
PyQt5 will give you the enhanced GUI for plot figures from the "*Qt5Agg*" matplotlib backend (otherwise: "*TkAgg*"). If PyQt5 is already installed when installing this package, it will be used as a default (see `evo_config show`). To change the plot backend afterwards, run `evo_config set plot_backend Qt5Agg`.
**ROS (optional)**
Some ROS-related features require a ROS installation, see [here](http://www.ros.org/). We are testing this package with ROS Noetic and Iron. Previous versions (`<= 1.12.0`) work with Melodic, Kinetic and Indigo.
*Note:* reading ROS bag files works also without a ROS installation thanks to the great [rosbags](https://pypi.org/project/rosbags/) package that is installed together with evo. This allows you also to read ROS 1 & 2 bags even if you don't have one of those ROS distros installed. (except for reading `/tf` topics, because there we need the buffer implementation from ROS)
**contextily (optional)**
[contextily](https://contextily.readthedocs.io/en/latest/index.html) is required for [adding map tiles](https://github.com/MichaelGrupp/evo/wiki/Plotting#geographic-map-tiles) to plots of geo-referenced data.
---
## Command Line Interface
After installation with pip, the following executables can be called globally from your command-line:
**Metrics:**
* `evo_ape` - absolute pose error
* `evo_rpe` - relative pose error
**Tools:**
* `evo_traj` - tool for analyzing, plotting or exporting one or more trajectories
* `evo_res` - tool for comparing one or multiple result files from `evo_ape` or `evo_rpe`
* `evo_fig` - (experimental) tool for re-opening serialized plots (saved with `--serialize_plot`)
* `evo_config` - tool for global settings and config file manipulation
Call the commands with `--help` to see the options, e.g. `evo_ape --help`. Tab-completion of command line parameters is available on UNIX-like systems.
**More documentation**
Check out the [Wiki on GitHub](https://github.com/MichaelGrupp/evo/wiki).
---
## Example Workflow
There are some example trajectories in the source folder in `test/data`.
### 1.) Plot multiple trajectories
Here, we plot two KITTI pose files and the ground truth using `evo_traj`:
```
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz
```
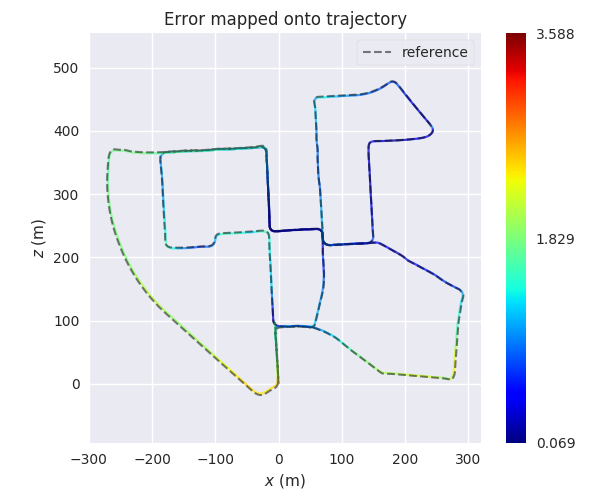
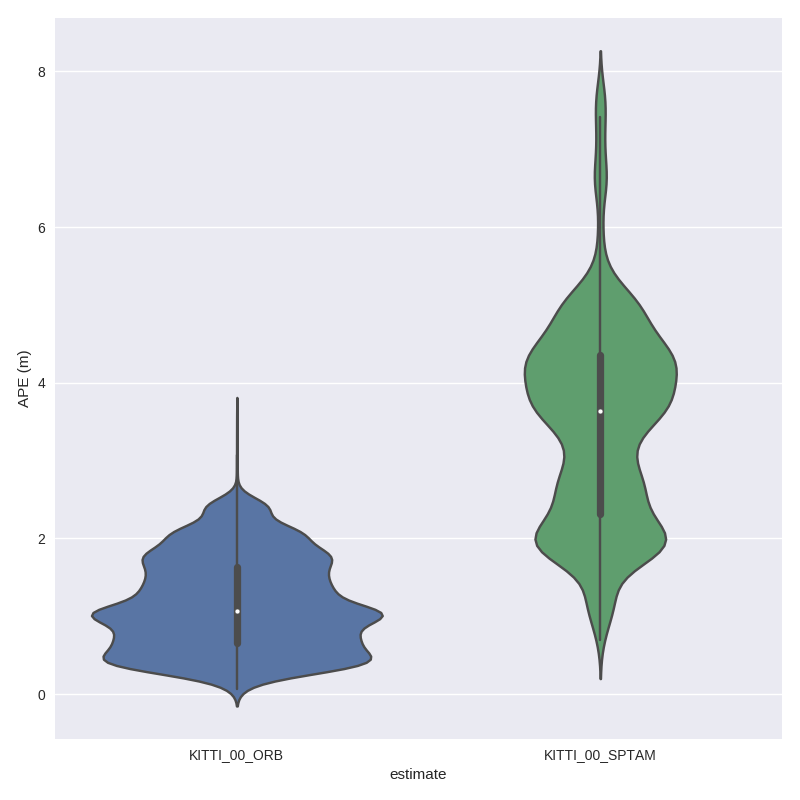
 ### 2.) Run a metric on trajectories
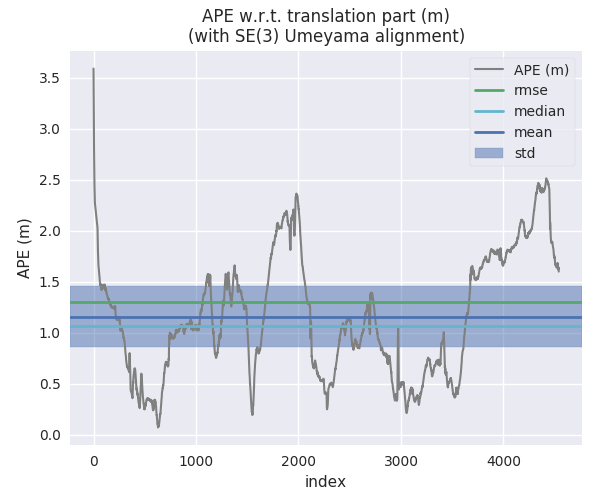
For example, here we calculate the absolute pose error for two trajectories from ORB-SLAM and S-PTAM using `evo_ape` (`KITTI_00_gt.txt` is the reference (ground truth)) and plot and save the individual results to .zip files for `evo_res`:
*First trajectory (ORB Stereo):*
```
mkdir results
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -va --plot --plot_mode xz --save_results results/ORB.zip
```
### 2.) Run a metric on trajectories
For example, here we calculate the absolute pose error for two trajectories from ORB-SLAM and S-PTAM using `evo_ape` (`KITTI_00_gt.txt` is the reference (ground truth)) and plot and save the individual results to .zip files for `evo_res`:
*First trajectory (ORB Stereo):*
```
mkdir results
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -va --plot --plot_mode xz --save_results results/ORB.zip
```
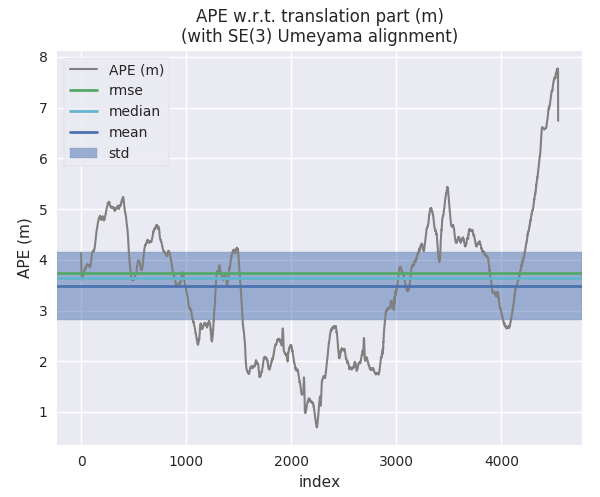
 *Second trajectory (S-PTAM):*
```
evo_ape kitti KITTI_00_gt.txt KITTI_00_SPTAM.txt -va --plot --plot_mode xz --save_results results/SPTAM.zip
```
*Second trajectory (S-PTAM):*
```
evo_ape kitti KITTI_00_gt.txt KITTI_00_SPTAM.txt -va --plot --plot_mode xz --save_results results/SPTAM.zip
```

 evo-master.zip 大约有214个文件
evo-master.zip 大约有214个文件
---
## Why?
evo has several advantages over other public benchmarking tools:
* common tools for different formats
* algorithmic options for association, alignment, scale adjustment for monocular SLAM etc.
* flexible options for output, [plotting](https://github.com/MichaelGrupp/evo/wiki/Plotting) or export (e.g. LaTeX plots or Excel tables)
* a powerful, configurable CLI that can cover many use cases
* modular `core` and `tools` libraries for custom extensions
* faster than other established Python-based tools ([see here](https://github.com/MichaelGrupp/evo/blob/master/doc/performance.md))
**What it's not:** a 1-to-1 re-implementation of a particular evaluation protocol tailored to a specific dataset.
---
## Installation / Upgrade
Installation is easy-peasy if you're familiar with this: https://xkcd.com/1987/#
evo supports **Python 3.8+**.
You might also want to use a [virtual environment](https://github.com/MichaelGrupp/evo/blob/master/doc/install_in_virtualenv.md).
### From PyPi
If you just want to use the executables of the latest release version, the easiest way is to run:
```bash
pip install evo
```
This will download the package and its dependencies from [PyPI](https://pypi.org/project/evo/) and install or upgrade them. If you want, you can subscribe to new releases via https://libraries.io/pypi/evo.
### From Source
Run this in the repository's base folder:
```bash
pip install --editable .
```
### Tab completion
Tab completion is supported via the [argcomplete](https://github.com/kislyuk/argcomplete/) package. Run `activate-global-python-argcomplete` after the installation to use it.
### Dependencies
**Python packages**
evo has some required dependencies that are ***automatically resolved*** during installation with pip.
See the `pyproject.toml` file for all details.
**PyQt5 (optional)**
PyQt5 will give you the enhanced GUI for plot figures from the "*Qt5Agg*" matplotlib backend (otherwise: "*TkAgg*"). If PyQt5 is already installed when installing this package, it will be used as a default (see `evo_config show`). To change the plot backend afterwards, run `evo_config set plot_backend Qt5Agg`.
**ROS (optional)**
Some ROS-related features require a ROS installation, see [here](http://www.ros.org/). We are testing this package with ROS Noetic and Iron. Previous versions (`<= 1.12.0`) work with Melodic, Kinetic and Indigo.
*Note:* reading ROS bag files works also without a ROS installation thanks to the great [rosbags](https://pypi.org/project/rosbags/) package that is installed together with evo. This allows you also to read ROS 1 & 2 bags even if you don't have one of those ROS distros installed. (except for reading `/tf` topics, because there we need the buffer implementation from ROS)
**contextily (optional)**
[contextily](https://contextily.readthedocs.io/en/latest/index.html) is required for [adding map tiles](https://github.com/MichaelGrupp/evo/wiki/Plotting#geographic-map-tiles) to plots of geo-referenced data.
---
## Command Line Interface
After installation with pip, the following executables can be called globally from your command-line:
**Metrics:**
* `evo_ape` - absolute pose error
* `evo_rpe` - relative pose error
**Tools:**
* `evo_traj` - tool for analyzing, plotting or exporting one or more trajectories
* `evo_res` - tool for comparing one or multiple result files from `evo_ape` or `evo_rpe`
* `evo_fig` - (experimental) tool for re-opening serialized plots (saved with `--serialize_plot`)
* `evo_config` - tool for global settings and config file manipulation
Call the commands with `--help` to see the options, e.g. `evo_ape --help`. Tab-completion of command line parameters is available on UNIX-like systems.
**More documentation**
Check out the [Wiki on GitHub](https://github.com/MichaelGrupp/evo/wiki).
---
## Example Workflow
There are some example trajectories in the source folder in `test/data`.
### 1.) Plot multiple trajectories
Here, we plot two KITTI pose files and the ground truth using `evo_traj`:
```
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz
```
### 2.) Run a metric on trajectories
For example, here we calculate the absolute pose error for two trajectories from ORB-SLAM and S-PTAM using `evo_ape` (`KITTI_00_gt.txt` is the reference (ground truth)) and plot and save the individual results to .zip files for `evo_res`:
*First trajectory (ORB Stereo):*
```
mkdir results
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -va --plot --plot_mode xz --save_results results/ORB.zip
```
*Second trajectory (S-PTAM):*
```
evo_ape kitti KITTI_00_gt.txt KITTI_00_SPTAM.txt -va --plot --plot_mode xz --save_results results/SPTAM.zip
```
资源文件列表:
 evo-master/
evo-master/- evo-master/.ci/
 evo-master/.ci/debian_install_pip3.sh 59B
evo-master/.ci/debian_install_pip3.sh 59B
- evo-master/.ci/release.sh 908B
- evo-master/.ci/ros_entrypoint.sh 72B
- evo-master/.ci/ros_run_tests.sh 93B
- evo-master/.ci/run_yapf.sh 328B
- evo-master/.dockerignore 39B
- evo-master/.github/
- evo-master/.github/ISSUE_TEMPLATE/
- evo-master/.github/ISSUE_TEMPLATE/error-report.md 724B
- evo-master/.github/ISSUE_TEMPLATE/feature_request.md 560B
- evo-master/.github/ISSUE_TEMPLATE/question-about-a-concept.md 88B
- evo-master/.github/stale.yaml 893B
- evo-master/.gitignore 1.23KB
- evo-master/.pylintrc 71B
- evo-master/.style.yapf 137B
- evo-master/Dockerfile.ros-jazzy 1.66KB
- evo-master/Dockerfile.rosnoetic 1.27KB
- evo-master/LICENSE 34.32KB
- evo-master/README.md 11.38KB
- evo-master/_config.yml 26B
- evo-master/azure-pipelines.yml 2.28KB
- evo-master/contrib/
- evo-master/contrib/README.md 98B
- evo-master/contrib/kitti_poses_and_timestamps_to_trajectory.py 1.55KB
- evo-master/contrib/multiply_timestamps.py 666B
- evo-master/contrib/print_duplicate_timestamps.sh 235B
- evo-master/contrib/record_tf_as_posestamped_bag.py 4.25KB
- evo-master/contrib/rename_est_name.py 611B
- evo-master/doc/
- evo-master/doc/alignment_demo.py 2.65KB
- evo-master/doc/assets/
- evo-master/doc/assets/ape_demo_ORB_map.png 48.34KB
- evo-master/doc/assets/ape_demo_ORB_raw.png 46.59KB
- evo-master/doc/assets/ape_demo_S-PTAM_map.png 50.23KB
- evo-master/doc/assets/ape_demo_S-PTAM_raw.png 42.83KB
- evo-master/doc/assets/keep_unchanged.png 30.47KB
- evo-master/doc/assets/length_unit_km.png 21.96KB
- evo-master/doc/assets/length_unit_km_xyz.png 30.28KB
- evo-master/doc/assets/map_tile_osm.png 353.75KB
- evo-master/doc/assets/markers.png 63.05KB
- evo-master/doc/assets/pose_corr_markers.png 113.36KB
- evo-master/doc/assets/projection_demo_projected.png 69.33KB
- evo-master/doc/assets/projection_demo_unprojected.png 69.56KB
- evo-master/doc/assets/res_box.png 14.79KB
- evo-master/doc/assets/res_dist.png 20.16KB
- evo-master/doc/assets/res_raw.png 81.46KB
- evo-master/doc/assets/res_stats.png 16.25KB
- evo-master/doc/assets/res_violin.png 39.32KB
- evo-master/doc/assets/ros_map.png 94.35KB
- evo-master/doc/assets/start_end_markers.png 35.72KB
- evo-master/doc/assets/traj_demo.png 93.48KB
- evo-master/doc/assets/traj_demo_xyz.png 104.89KB
- evo-master/doc/assets/update.png 41.2KB
- evo-master/doc/assets/zoom_to_map.png 36.48KB
- evo-master/doc/examples/
- evo-master/doc/examples/config_ape.example.json 212B
- evo-master/doc/examples/config_rpe-for-each.example.json 172B
- evo-master/doc/examples/config_rpe.example.json 296B
- evo-master/doc/examples/custom_app.py 2.28KB
- evo-master/doc/install_in_virtualenv.md 2.47KB
- evo-master/doc/jupyter_notebook.md 1.06KB
- evo-master/doc/performance.md 2.17KB
- evo-master/evo/
- evo-master/evo/LICENSE 34.32KB
- evo-master/evo/__init__.py 583B
- evo-master/evo/common_ape_rpe.py 9.39KB
- evo-master/evo/core/
- evo-master/evo/core/__init__.py
- evo-master/evo/core/filters.py 8.02KB
- evo-master/evo/core/geometry.py 3.32KB
- evo-master/evo/core/lie_algebra.py 6.85KB
- evo-master/evo/core/metrics.py 18.47KB
- evo-master/evo/core/result.py 4.64KB
- evo-master/evo/core/sync.py 4.53KB
- evo-master/evo/core/trajectory.py 21.6KB
- evo-master/evo/core/transformations.py 64.65KB
- evo-master/evo/core/units.py 1.33KB
- evo-master/evo/entry_points.py 3.67KB
- evo-master/evo/ipython_config.py 22.63KB
- evo-master/evo/main_ape.py 6.57KB
- evo-master/evo/main_ape_parser.py 7.93KB
- evo-master/evo/main_config.py 12.88KB
- evo-master/evo/main_evo.py 6.57KB
- evo-master/evo/main_fig.py 3.59KB
- evo-master/evo/main_ipython.py 2.53KB
- evo-master/evo/main_res.py 9.69KB
- evo-master/evo/main_res_parser.py 2.66KB
- evo-master/evo/main_rpe.py 7.92KB
- evo-master/evo/main_rpe_parser.py 8.64KB
- evo-master/evo/main_traj.py 20.9KB
- evo-master/evo/main_traj_parser.py 8.3KB
- evo-master/evo/tools/
- evo-master/evo/tools/__init__.py
- evo-master/evo/tools/_typing.py 846B
- evo-master/evo/tools/contextily_helper.py 3.5KB
- evo-master/evo/tools/file_interface.py 21.65KB
- evo-master/evo/tools/log.py 3.89KB
- evo-master/evo/tools/pandas_bridge.py 5.43KB
- evo-master/evo/tools/plot.py 37.02KB
- evo-master/evo/tools/settings.py 4.85KB
- evo-master/evo/tools/settings_template.py 8.56KB
- evo-master/evo/tools/tf_cache.py 12.48KB
- evo-master/evo/tools/tf_id.py 2.3KB
- evo-master/evo/tools/user.py 1.31KB
- evo-master/notebooks/
- evo-master/notebooks/metrics.py_API_Documentation.ipynb 20.11KB
- evo-master/notebooks/metrics_interactive.ipynb 10.3KB
- evo-master/notebooks/metrics_tutorial.ipynb 727B
- evo-master/notebooks/pandas_bridge.ipynb 5.31KB
- evo-master/pyproject.toml 1.84KB
- evo-master/test/
- evo-master/test/ape_rpe_smoke_test.py 1002B
- evo-master/test/cfg/
- evo-master/test/cfg/ape_rpe/
- evo-master/test/cfg/ape_rpe/all_pairs_deg.json 316B
- evo-master/test/cfg/ape_rpe/all_pairs_frames.json 316B
- evo-master/test/cfg/ape_rpe/all_pairs_meters.json 316B
- evo-master/test/cfg/ape_rpe/all_pairs_plot.json 389B
- evo-master/test/cfg/ape_rpe/all_pairs_rad.json 318B
- evo-master/test/cfg/ape_rpe/n_to_align.json 339B
- evo-master/test/cfg/ape_rpe/not_aligned.json 319B
- evo-master/test/cfg/ape_rpe/origin_aligned.json 29B
- evo-master/test/cfg/ape_rpe/pairs_from_reference.json 222B
- evo-master/test/cfg/ape_rpe/se3_aligned.json 318B
- evo-master/test/cfg/ape_rpe/sim3_aligned.json 317B
- evo-master/test/cfg/ape_rpe/t_offset.json 320B
- evo-master/test/cfg/ape_rpe/write_assets_xy.json 508B
- evo-master/test/cfg/ape_rpe/write_assets_xyz.json 536B
- evo-master/test/cfg/res/
- evo-master/test/cfg/res/merge.json 311B
- evo-master/test/cfg/res/use_filenames.json 29B
- evo-master/test/cfg/res/use_rel_time.json 28B
- evo-master/test/cfg/res/write_assets.json 292B
- evo-master/test/cfg/tf/
- evo-master/test/cfg/tf/tf.json 91B
- evo-master/test/cfg/traj/
- evo-master/test/cfg/traj/bag/
- evo-master/test/cfg/traj/bag/export.json 106B
- evo-master/test/cfg/traj/bag/merge.json 351B
- evo-master/test/cfg/traj/common/
- evo-master/test/cfg/traj/common/align_100.json 353B
- evo-master/test/cfg/traj/common/full_check.json 349B
- evo-master/test/cfg/traj/common/not_aligned.json 353B
- evo-master/test/cfg/traj/common/origin_aligned.json 28B
- evo-master/test/cfg/traj/common/plot_specialities.json 72B
- evo-master/test/cfg/traj/common/se3_aligned.json 352B
- evo-master/test/cfg/traj/common/sim3_aligned.json 350B
- evo-master/test/cfg/traj/common/sync.json 21B
- evo-master/test/cfg/traj/common/write_assets_xy.json 602B
- evo-master/test/cfg/traj/common/write_assets_xyz.json 603B
- evo-master/test/cfg/traj/euroc/
- evo-master/test/cfg/traj/euroc/export.json 107B
- evo-master/test/cfg/traj/kitti/
- evo-master/test/cfg/traj/kitti/export.json 54B
- evo-master/test/cfg/traj/tum/
- evo-master/test/cfg/traj/tum/export.json 107B
- evo-master/test/cfg/traj/tum/merge.json 351B
- evo-master/test/data/
- evo-master/test/data/.gitignore 9B
- evo-master/test/data/KITTI_00_ORB.txt 673.08KB
- evo-master/test/data/KITTI_00_SPTAM.txt 1.32MB
- evo-master/test/data/KITTI_00_gt.txt 711.79KB
- evo-master/test/data/KITTI_00_gt_times.txt 57.65KB
- evo-master/test/data/ROS_example.bag 3.54MB
- evo-master/test/data/V102.txt 159.65KB
- evo-master/test/data/V102_groundtruth.csv 2.71MB
- evo-master/test/data/fr2_desk_ORB.txt 296.26KB
- evo-master/test/data/fr2_desk_ORB_kf_mono.txt 13.94KB
- evo-master/test/data/fr2_desk_groundtruth.txt 1.35MB
- evo-master/test/data/freiburg1_xyz-ORB_kf_mono.txt 2.81KB
- evo-master/test/data/freiburg1_xyz-groundtruth.txt 196.39KB
- evo-master/test/data/freiburg1_xyz-rgbdslam.txt 63.95KB
- evo-master/test/data/freiburg1_xyz-rgbdslam_drift.txt 63.87KB
- evo-master/test/data/freiburg1_xyz-rgbdslam_drift_short.txt 3.24KB
- evo-master/test/data/georeferenced.tum 196.5KB
- evo-master/test/data/res_files/
- evo-master/test/data/res_files/orb_ape.zip 36.27KB
- evo-master/test/data/res_files/orb_rpe-for-each.zip 1.09KB
- evo-master/test/data/res_files/orb_rpe.zip 3.59KB
- evo-master/test/data/res_files/sptam_ape.zip 36.27KB
- evo-master/test/data/res_files/sptam_rpe-for-each.zip 1.08KB
- evo-master/test/data/res_files/sptam_rpe.zip 3.6KB
- evo-master/test/data/tf_example.bag 33.3KB
- evo-master/test/data/tf_example/
- evo-master/test/data/tf_example/metadata.yaml 1.03KB
- evo-master/test/data/tf_example/tf_example.db3 104KB
- evo-master/test/demos/
- evo-master/test/demos/.gitignore 87B
- evo-master/test/demos/ape_demo.sh 1.32KB
- evo-master/test/demos/clean.sh 204B
- evo-master/test/demos/config_demo.sh 989B
- evo-master/test/demos/example.tex 596B
- evo-master/test/demos/latex_demo.sh 751B
- evo-master/test/demos/res_demo.sh 1.05KB
- evo-master/test/demos/rpe_demo.sh 1.43KB
- evo-master/test/demos/traj_demo.sh 1.43KB
- evo-master/test/helpers.py 1.33KB
- evo-master/test/res_smoke_test.py 901B
- evo-master/test/run_all_demos.sh 422B
- evo-master/test/test_file_interface.py 9.53KB
- evo-master/test/test_filters.py 6.9KB
- evo-master/test/test_lie_algebra.py 5.91KB
- evo-master/test/test_pandas_bridge.py 1.58KB
- evo-master/test/test_result.py 2.78KB
- evo-master/test/test_sync.py 3.33KB
- evo-master/test/test_trajectory.py 11.31KB
- evo-master/test/traj_smoke_test.py 1.89KB
- evo-master/test/tum_benchmark_tools/
- evo-master/test/tum_benchmark_tools/README.md 242B
- evo-master/test/tum_benchmark_tools/associate.py 5.22KB
- evo-master/test/tum_benchmark_tools/evaluate_ate.py 8.27KB
- evo-master/test/tum_benchmark_tools/evaluate_rpe.py 15.07KB
Celechron-main-1.zip
3-CPaR_noclearance.zip
FBOCC&SparseOCC源代码
一份EtherCAT主站的FPGA Verilog代码
ethercat 主站 FPGA verilog 代码
使用FPGA逻辑实现EtherCAT协议,实现主站DC功能。更加突出了EtherCAT现场总线的同步性能及高效性
基于FPGA的EtherCAT主站设计研究
基于FPGA的EtherCAT主站方案
基于FPGA的EtherCAT主站研究
一种基于FPGA实现的EtherCAT主站运动控制器的制作方法
基于FPGA的EtherCAT主站实现与高性能运动控制
基于FPGA的高性能硬件EtherCAT主站研究

2_最终版应急预案20240419.zip


样本图:blog.csdn.net/2403_88102872/article/details/144549628
文件放服务器下载,请务必到电脑端资源预览或者资源详情查看然后下载
重要说明:图片中有部分增强
数据集格式:Pascal VOC格式+YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)
图片数量(jpg文件个数):1983
标注数量(xml文件个数):1983
标注数量(txt文件个数):1983
标注类别数:3
标注类别名称:["ice","line","snowline"]
每个类别标注的框数:
ice 框数 = 3253
line 框数 = 69
snowline 框数 = 743
总框数:4065
使用标注工具:labelImg
标注规则:对类别进行画矩形框
特别声明:本数据集不对训练的模型或者权重文件精度作任何保证,数据集只提供准确且合理标注
CWS-Hmm_BiLSTM-CRF-master.zip
文件放服务器下载,请务必到电脑端资源预览或者资源详情查看然后下载